marccd.adl
This is an EPICS areaDetector driver for the Rayonix (formerly MarCCD) detectors from Rayonix/MarUSA.
The interface to the detector is via a TCP/IP socket interface to the marccd_server_socket server that Rayonix provides. The marccd_server_socket program must be started before the areaDetector software is started, by running the marccd program and executing Acquire/Remote Control/Start.
marccd must be using Version 1 (for non-HS detectors) or 2 (for HS detectors) of the remote protocol. This is normally done done by editing the file marccd/configuration/marccd.conf and replacing the line
include marccd_server_v0.conf
with
include marccd_server_v1.conf
The file marccd_server_v1.conf should contain the lines:
remote_mode_server_command /home/marccd/contrib/marccd_server/marccd_server_socket
remote_mode_server_arguments 2222
The first line points to the location of the marccd_server_socket program that is
used to implement remote control. In order to work with the areaDetector driver
this must be a version of this program created after November 11, 2008 when support
for the get_frameshift command was added. A recent version of this
program can be downloaded from the
Rayonix FTP site.
The marccd program saves the data to disk as TIFF files. The areaDetector software reads these disk files in order to read the data, because marccd does not provide another mechanism to access the data.
This driver inherits from ADDriver. It implements many of the parameters in asynNDArrayDriver.h and in ADArrayDriver.h. It also implements a number of parameters that are specific to the MarCCD detectors. The marCCD class documentation describes this class in detail.
The following table describes how the MarCCD driver implements some of the standard driver parameters.
| Implementation of Parameters in asynNDArrayDriver.h and ADDriver.h, and EPICS Record Definitions in ADBase.template and NDFile.template | ||
| Parameter index variable | EPICS record name | Description |
|---|---|---|
| ADFrameType | $(P)$(R)FrameType |
The driver redefines the choices for the ADFrameType parameter (record $(P)$(R)FrameType)
from ADDriver.h. The choices for the MarCCD are:
|
| ADImageMode | $(P)$(R)ImageMode |
The driver redefines the choices for the ADImageMode parameter (record $(P)$(R)ImageMode)
from ADDriver.h.
|
| ADTriggerMode | $(P)$(R)TriggerMode |
The driver redefines the choices for the ADTriggerMode parameter (record $(P)$(R)TriggerMode)
from ADDriver.h.
|
| ADNumImages | $(P)$(R)NumImages | Controls the number of images to acquire when ADImageMode is ADImageMultiple. |
| ADAcquirePeriod | $(P)$(R)AcquirePeriod | Controls the period between images when ADImageMode is ADImageMultiple or ADImageContinuous. If this is greater than the acquisition time plus readout overhead then the driver will wait until the period has elapsed before starting the next acquisition. |
| ADReadStatus | $(P)$(R)ReadStatus | Writing 1 to this parameter causes the status to be read from the marccd server. By processing or periodically scanning this record the status information can be refreshed. This is normally not necessary, but if ADArrayCallbacks is 0 and marCCDOverlap is 1 then the status will not indicate that the system is idle when acquisition is complete, because the driver polling stops before the file is written. This record can be used to eliminate the confusion that might cause. |
| NDFilePath | $(P)$(R)FilePath | Controls the path for saving images. It must be a valid path for marccd and for the areaDetector driver, which is normally running in an EPICS IOC. If marccd and the EPICS IOC are not running on the same machine then soft links will typically be used to make the paths look identical. |
| NDFileFormat | $(P)$(R)FileFormat | marccd only supports TIFF files. |
It is useful to use an NDPluginStats plugin set to use the entire marCCD detector. The MaxValue_RBV PV can be monitored to make sure that the 16-bit limit of 65,535 is not being approached in any pixel.
The MarCCD driver implements the following parameters in addition to those in asynNDArrayDriver.h
and ADDriver.h. Note that to reduce the width of this table the parameter index
variable names have been split into 2 lines, but these are just a single name, for
example marCCDState.
| Parameter Definitions in marccd.cpp and EPICS Record Definitions in marccd.template | ||||||
| Parameter index variable | asyn interface | Access | Description | drvInfo string | EPICS record name | EPICS record type |
|---|---|---|---|---|---|---|
| Status parameters | ||||||
|
marCCD ServerMode |
asynInt32 | r/o | The version number of the server software running on the detector. This is 1 for the servers running on non-HS detectors, and 2 for the servers running on HS detectors. | MAR_SERVER_MODE | $(P)$(R)ServerMode_RBV | longin |
|
marCCD State |
asynInt32 | r/o | State word returned by marccd server. The low-order 4-bits of this word are the state of the marccd server, and will be Idle (0x0), Error (0x7), or Busy (0x8). The next 24 bits encode the state of the 6 server tasks (Acquire, Readout, Correct, Save, Dezinger, Series) with 4-bits per task. Each task can be in the state Idle (0x0), Queued (0x1), Executing (0x2), Error (0x4), or Reserved (0x8). | MAR_STATE | $(P)$(R)MarState_RBV | longin |
|
marCCD Status |
asynInt32 | r/o | Status of the marccd server task (Idle, Error, or Busy) | MAR_STATUS | $(P)$(R)MarStatus_RBV | mbbi |
|
marCCDTask AcquireStatus |
asynInt32 | r/o | Status of the marccd server acquire task (Idle, Queued, Executing, Error, or Reserved) | MAR_ACQUIRE_STATUS | $(P)$(R)MarAcquireStatus_RBV | mbbi |
|
marCCDTask ReadoutStatus |
asynInt32 | r/o | Status of the marccd server readout task (Idle, Queued, Executing, Error, or Reserved) | MAR_READOUT_STATUS | $(P)$(R)MarReadoutStatus_RBV | mbbi |
|
marCCDTask CorrectStatus |
asynInt32 | r/o | Status of the marccd server correct task (Idle, Queued, Executing, Error, or Reserved) | MAR_CORRECT_STATUS | $(P)$(R)MarCorrectStatus_RBV | mbbi |
|
marCCDTask WritingStatus |
asynInt32 | r/o | Status of the marccd server file writing task (Idle, Queued, Executing, Error, or Reserved) | MAR_WRITING_STATUS | $(P)$(R)MarWritingStatus_RBV | mbbi |
|
marCCDTask DezingerStatus |
asynInt32 | r/o | Status of the marccd server dezinger task (Idle, Queued, Executing, Error, or Reserved) | MAR_DEZINGER_STATUS | $(P)$(R)MarDezingerStatus_RBV | mbbi |
|
marCCDTask SeriesStatus |
asynInt32 | r/o | Status of the marccd server series acquisition task (Idle, Queued, Executing, Error, or Reserved). | MAR_SERIES_STATUS | $(P)$(R)MarSeriesStatus_RBV | mbbi |
| Optimization parameters | ||||||
|
marCCD Overlap |
asynInt32 | r/w | The marccd server has 5 tasks (Acquire, Readout, Correct, Write, Dezinger) that can overlap their operation. The areaDetector driver can exploit this to improve performance in some circumstances. If this parameter is set to 1 (Overlap) then the ADAcquire parameter will go to 0 (Done) when the Readout task is done executing, but before the Correct and Write tasks have finished correcting and saving the file to disk. This improves performance because the next image can begin as soon as ADAcquire goes to done, and hence before the previous image is written to disk. Note, however that this parameter must be set to 0 (Sequential) if callbacks are being used to compute statistics that are being used in data collection, e.g. in a scan. If this is not done then the statistics information will be grabbed before it is updated and incorrect scan data will result. | MAR_OVERLAP |
$(P)$(R)OverlapMode
$(P)$(R)OverlapMode_RBV |
bo
bi |
| Frameshift parameters | ||||||
|
marCCD Frameshift |
asynInt32 | r/w | marccd can be used for time-resolved studies by collecting multiple data sets before reading out the detector. This is done by placing a mask in front of the detector that restricts the x-rays to horizontal stripe. An exposure is made, and then an external signal causes the detector to shift the image by the number of lines given by this parameter. A number of images separated by times of a few milliseconds can be collected, and then the detector is read out. Set this parameter to 0 to disable frameshift mode. | MAR_FRAME_SHIFT |
$(P)$(R)FrameShift
$(P)$(R)FrameShift_RBV |
longout
longin |
| Series acquisition parameters (ServerMode=2 only) | ||||||
|
marCCD SeriesFileTemplate |
asynOctet | r/w | The template for the file names written in trigger or timed series acquisition modes. The FilePath, FileName and FileNumber are combined into a string using this C format string. This is used to construct a base file name. The actual file names in the series are constructed using this base file name plus the SeriesFileFirst and SeriesFileDigits records. Example: "%s%s_%3.3d" | MAR_SERIES_FILE_TEMPLATE |
$(P)$(R)SeriesFileTemplate
$(P)$(R)SeriesFileTemplate_RBV |
waveform
waveform |
|
marCCD SeriesFileFirst |
asynInt32 | r/w | The number of the first file in a triggered or timed series acquisition. | MAR_SERIES_FILE_FIRST |
$(P)$(R)SeriesFileFirst
$(P)$(R)SeriesFileFirst_RBV |
longout
longin |
|
marCCD SeriesFileDigits |
asynInt32 | r/w | The number of digits to use for the file numbers in triggered or timed series acquisition. | MAR_SERIES_FILE_DIGITS |
$(P)$(R)SeriesFileDigits
$(P)$(R)SeriesFileDigits_RBV |
longout
longin |
| Gating and readout parameters (ServerMode=2 only) | ||||||
|
marCCD GateMode |
asynInt32 | r/w |
The gating mode for the detector. Choices are: "None" "Gated" |
MAR_GATE_MODE |
$(P)$(R)GateMode
$(P)$(R)GateMode_RBV |
mbbo
mbbi |
|
marCCD ReadoutMode |
asynInt32 | r/w |
The readout mode for the detector. Choices are: "Standard" "High gain" "Low noise" "HDR" (High Dynamic Range) |
MAR_GATE_MODE |
$(P)$(R)GateMode
$(P)$(R)GateMode_RBV |
mbbo
mbbi |
| Baseline stabilization parameters | ||||||
|
marCCD Stability |
asynFloat64 | r/w |
The following text is from a document describing baseline stabilization from Rayonix.
"Baseline stabilization is an optional addition to the marccd data collection software.
This software option stabilizes the baseline offset level of each CCD image to a
more accurate value than only the analog electronics provide. This feature is important
in any type of measurement that requires comparisons between successive data frames
that include, for example, subtracting (or adding) two data frames, such as one
often must do in small angle scattering experiments. Baseline instability can make
it appear that there are slightly more or slightly less X-rays across the entire
detector (or readout channel) in a data frame. That is different than the read noise,
which has no net effect on the average. A stable baseline is less critical for data
analysis in which a background value is calculated by measuring the background around
each individual spot on the same data frame (typically done in single crystal crystallography
experiments). The baseline level of a CCD is usually established by measuring an
analog voltage of the readout amplifier, and the "zero" level can drift over time
due to ambient temperature changes or other electronic instability. The time scale
on which the drift occurs is usually greater than about 20 minutes or so; therefore,
the marccd software default for recollecting background images is every 20 minutes
or once every data segment in a dataset. Expected baseline stability improvement
Whereas the older MarCCD detectors had a baseline stability that was only good to
about ±1-2 ADU, the SX Series and MX Series detectors have improved electronic
baseline stability, closer to ±0.5 ADU. When this Baseline Stabilization
software option is used, the baseline can be improved much further, with baseline
stability as low as about ±0.01 ADU. CCD overscan The method of improving
the baseline is by an overscan technique. When this option is "on", extra blank
pixels are read out from the CCD after each line of the CCD is read out from the
serial register. In the marccd program memory, a temporary data frame which is larger
than the normal data frame is recorded, and the pixels outside the imaging area
are used to compute the baseline. These blank pixels do not correspond to any real
region of the CCD; they are just a result of telling the readout electronics to
readout with no charge present. The user must also enter a target baseline stability value. This number represents the accuracy to which the program will try to stabilize the baseline, in ADU (analog-to-digital units). The resulting data frame will have a baseline value that is approximately the corrected_frame_bias, typically 10 or 100, plus or minus the target baseline stability value. For example, if the user enters 0.1, and the corrected_frame_bias is 10 (i.e. images with no X-rays normally have a baseline around 10 ADU), then a data frame with X-rays will result in a baseline value of approximately 10 ±0.1 ADU (and each individual pixel will also have contributions due to X-rays and read noise). The accuracy limit of this software feature is about 0.01 ADU, so any target value entered between 0 and 0.01 is automatically converted to the limit, 0.01 ADU. Entering a target value of 0 is equivalent to turning off the baseline stabilization." |
MAR_STABILITY |
$(P)$(R)Stability
$(P)$(R)Stability_RBV |
ao
ai |
| Timeout parameters | ||||||
|
marCCD TiffTimeout |
asynFloat64 | r/w | Timeout in seconds when reading a TIFF file. It should be set to several seconds, because there it can take some time for the marccd server to write the file. | MAR_TIFF_TIMEOUT | $(P)$(R)ReadTiffTimeout | ao |
| Ancillary parameters. These parameters are written to the header of the marccd TIFF file. | ||||||
|
marCCD DetectorDistance |
asynFloat64 | r/w | Distance from the sample to the detector (mm) | MAR_DETECTOR_DISTANCE | $(P)$(R)DetectorDistance | ao |
|
marCCD BeamX |
asynFloat64 | r/w | X position of the direct beam on the detector (mm) | MAR_BEAM_X | $(P)$(R)BeamX | ao |
|
marCCD BeamY |
asynFloat64 | r/w | Y position of the direct beam on the detector (mm) | MAR_BEAM_Y | $(P)$(R)BeamY | ao |
|
marCCD StartPhi |
asynFloat64 | r/w | Starting value of phi rotation (deg) | MAR_START_PHI | $(P)$(R)StartPhi | ao |
|
marCCD RotationAxis |
asynOctet | r/w | Rotation axis being used (phi, omega, etc.) | MAR_ROTATION_AXIS | $(P)$(R)RotationAxis | stringout |
|
marCCD RotationRange |
asynFloat64 | r/w | Rotation range of the rotation axis. | MAR_ROTATION_RANGE | $(P)$(R)RotationRange | ao |
|
marCCD TwoTheta |
asynFloat64 | r/w | Detector two-theta angle (deg); requires theta axis definition with display name "TwoTheta" in a marccd configuration file (i.e. "theta_display_name TwoTheta"). This configuration file is typically goniostat_none.conf or goniostat_sw.conf, but any configuration file that gets loaded can be used. | MAR_TWO_THETA | $(P)$(R)TwoTheta | ao |
|
marCCD Wavelength |
asynFloat64 | r/w | Wavelength in Angstroms. | MAR_WAVELENGTH | $(P)$(R)Wavelength | ao |
|
marCCD FileComments |
asynOctet | r/w | Comments for this file. | MAR_FILE_COMMENTS | $(P)$(R)FileComments | waveform |
|
marCCD DatasetComments |
asynOctet | r/w | Comments for this dataset. | MAR_DATASET_COMMENTS | $(P)$(R)DatasetComments | waveform |
| Debugging | ||||||
| N/A | N/A | N/A | asyn record to control debugging communication with marccd_server_socket program | N/A | $(P)$(R)marSserverAsyn | asyn |
The MarCCD driver does not support the following standard driver parameters because they are not supported in the marccd program:
The marCCD driver is created with the marCCDConfig command, either from C/C++ or from the EPICS IOC shell.
int marCCDConfig(const char *portName, const char *serverPort,
int maxBuffers, size_t maxMemory,
int priority, int stackSize)
For details on the meaning of the parameters to this function refer to the detailed documentation on the mar345Config function in the marCCD.cpp documentation and in the documentation for the constructor for the marCCD class.
There an example IOC boot directory and startup script (iocBoot/iocMARCCD/st.cmd) provided with areaDetector.
The following show the MEDM screens that are used to control the MarCCD detector. Note that the general purpose screen ADBase.adl can be used, but it exposes many controls that are not applicable to the MarCCD, and lacks some fields that are important for the MarCCD.
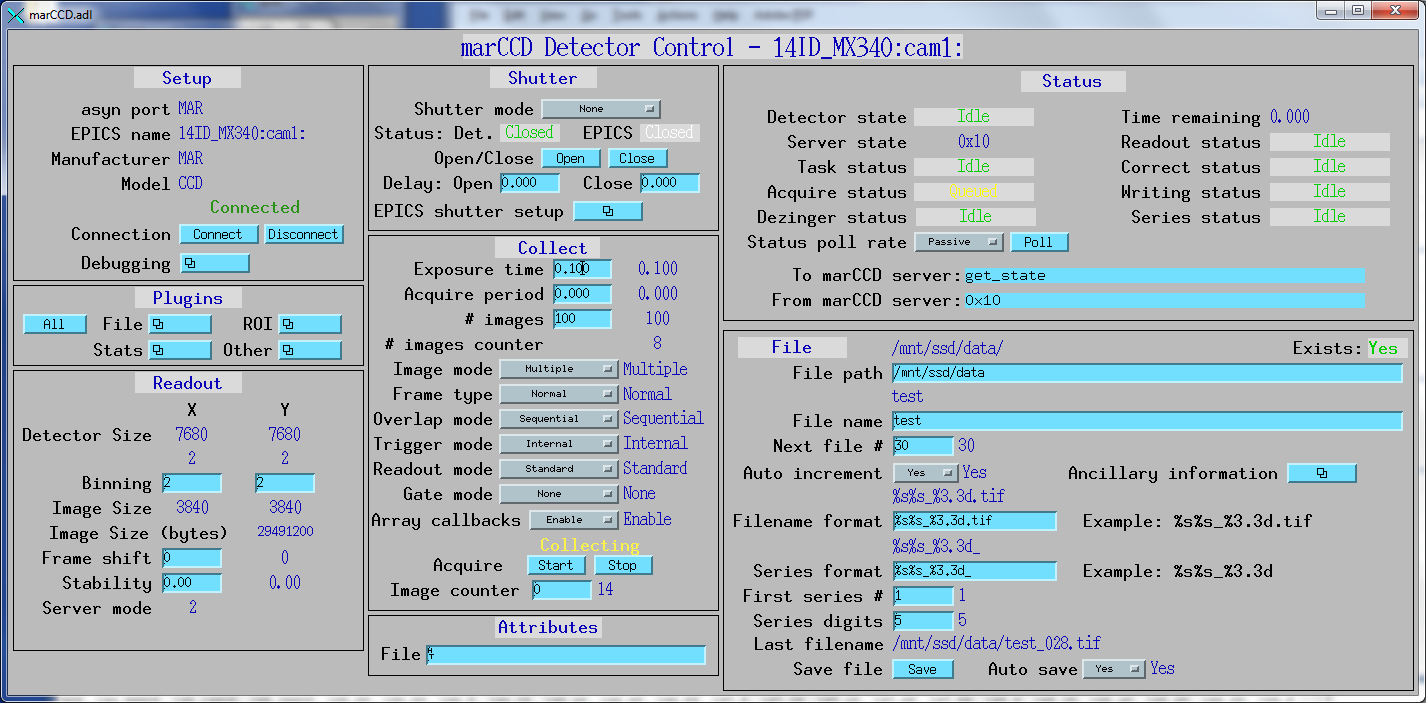
marccd.adl is the main screen used to control the MarCCD driver.
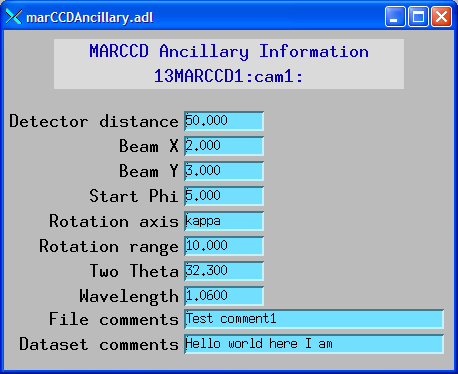
marccdAncillary.adl is the screen used to input ancillary information
that is written to the MarCCD TIFF files.
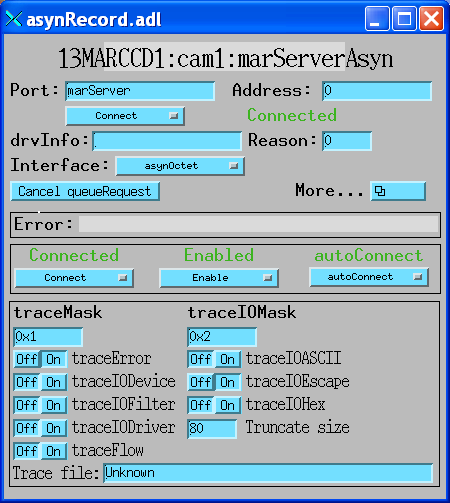
asynRecord.adl is used to control the debugging information printed
by the asyn TCP/IP driver (asynTraceIODriver) and the EPICS device support (asynTraceIODevice).
asynOctet.adl can be used to send any command to the marccd remote
server and display the response. It can be loaded from the More menu in asynRecord.adl
above.

The following measurements were done to demonstrate the performance that can be obtained with the areaDetector MarCCD driver. These measurements were made with a MAR-165 CCD. The EPICS IOC was running on the same Linux machine as the marccd program. The acquisition time was 1 second.
| Binning | Image size | marCCDOverlap | Time for 10 images | Overhead per image | Time per task |
|---|---|---|---|---|---|
| 2x2 | 2048x2048 | Sequential | 50.0 | 4.00 |
Readout: 3.02
Correct: 0.56 Save: 0.20 |
| 2x2 | 2048x2048 | Overlap | 46.2 | 3.62 | Same |
| 4x4 | 1024x1024 | Sequential | 29.0 | 1.90 |
Readout: 1.30
Correct: 0.28 Save: 0.06 |
| 4x4 | 1024x1024 | Overlap | 28.7 | 1.87 | Same |
| 8x8 | 512x512 | Sequential | 24.0 | 1.40 |
Readout: 0.78
Correct: 0.29 Save: 0.06 |
| 8x8 | 512x512 | Overlap | 23.6 | 1.36 | Same |
The following are some current restrictions of the MarCCD driver: